Line Following Robot
Custom chassis, custom gearbox, built from scratch.
What Makes It Different
Most line followers use a kit. This one didn't.
The line-following algorithm is the easy part. The harder problem was building a drivetrain worth putting it in. I designed a custom chassis and gearbox from scratch in Fusion 360 and 3D printed every structural component. The result is a robot with a proper gear reduction, clean motor mounts, and a chassis sized for the electronics, not the other way around.
How It Works
01
Sense
IR sensors continuously read the line beneath the robot, detecting position relative to the track.
02
Decide
A PID control loop processes sensor data and calculates the correction needed to stay on the line.
03
Drive
The custom gearbox translates motor output into smooth, controlled differential steering.

The Chassis
Chassis
Fully custom, designed in Fusion 360 and 3D printed in PLA.
Gearbox
Custom gear reduction designed to match motor RPM to usable drive speed.
Motors
Standard DC hobby motors mounted in custom Fusion 360 designed housings.
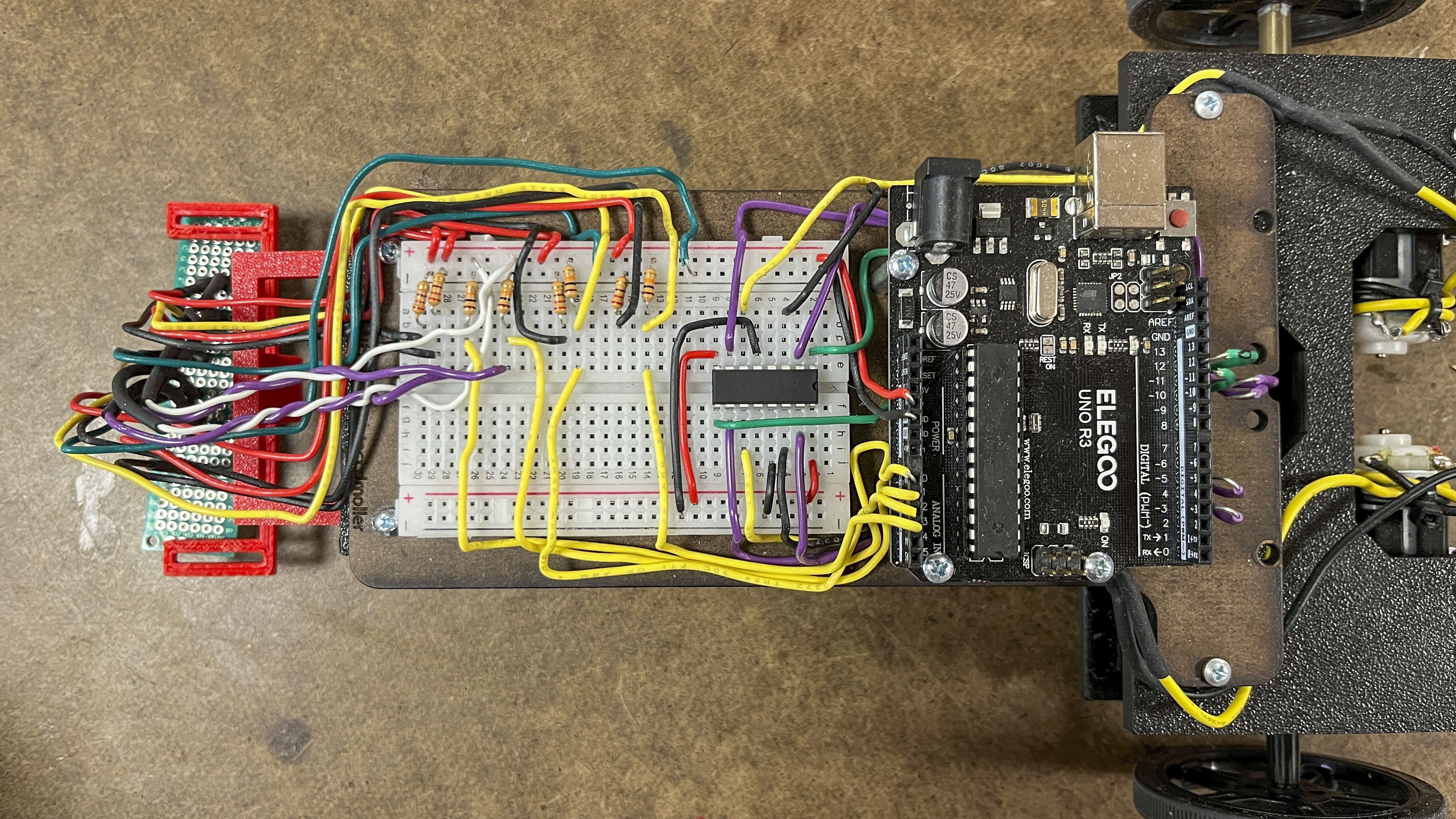
Sensors
IR sensor array for line detection.
Control
PID loop for smooth steering correction.
Built With
Design
Electronics
Designed and built from scratch as part of my electronics coursework at Wesleyan.
Get in Touch